We’re stoked to have recently acquired an ASUS Xtion Pro Live 3D sensor, which is ASUS’s version of the Microsoft Kinect. The Kinect has caused an explosion of innovation in the hobbyist robotics world over the past year. The ASUS Xtion sensor is an improvement from a robotics point-of-view, due to its smaller size, lighter weight, cross-platform open API, and USB-only power requirement.
We’ve only had it for a few days, but here’s what we’ve come up with so far:
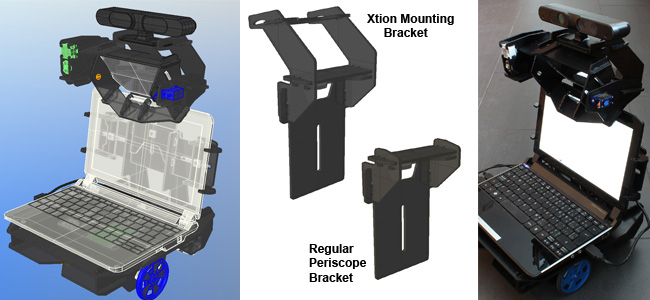
We made a simple mounting bracket for now, that is a swap-in for the regular periscope bracket. The Asus sensor snaps into it, and is plugged into a spare USB port.
(zoom)
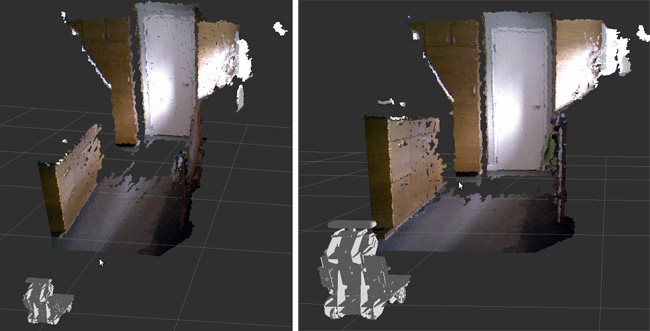
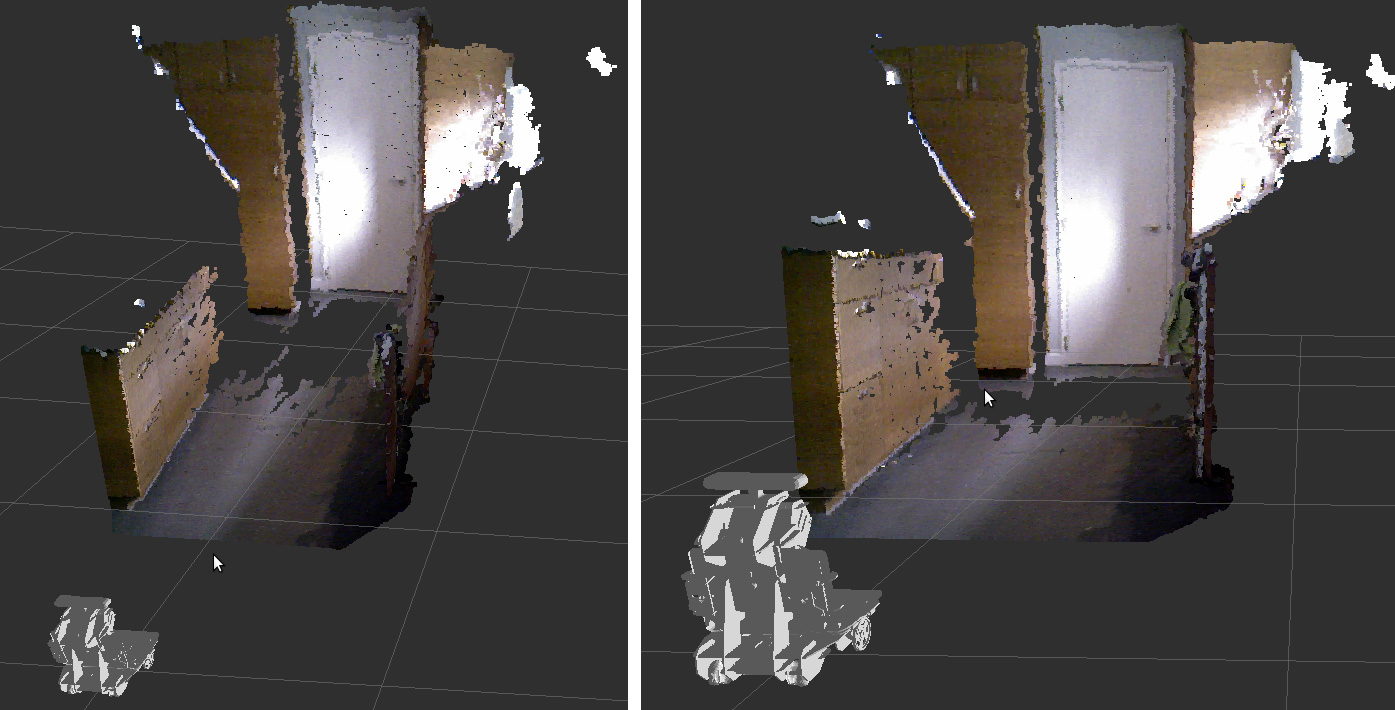
We made a basic Oculus module for ROS, the open-source Robot Operating System, running on Linux. Using the Rviz 3D visualization tool (included with ROS), we can get a look at what Oculus is “seeing”, in 3D model space.
(zoom)
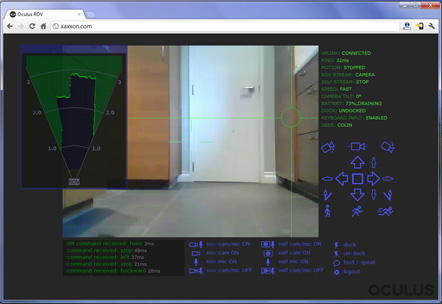
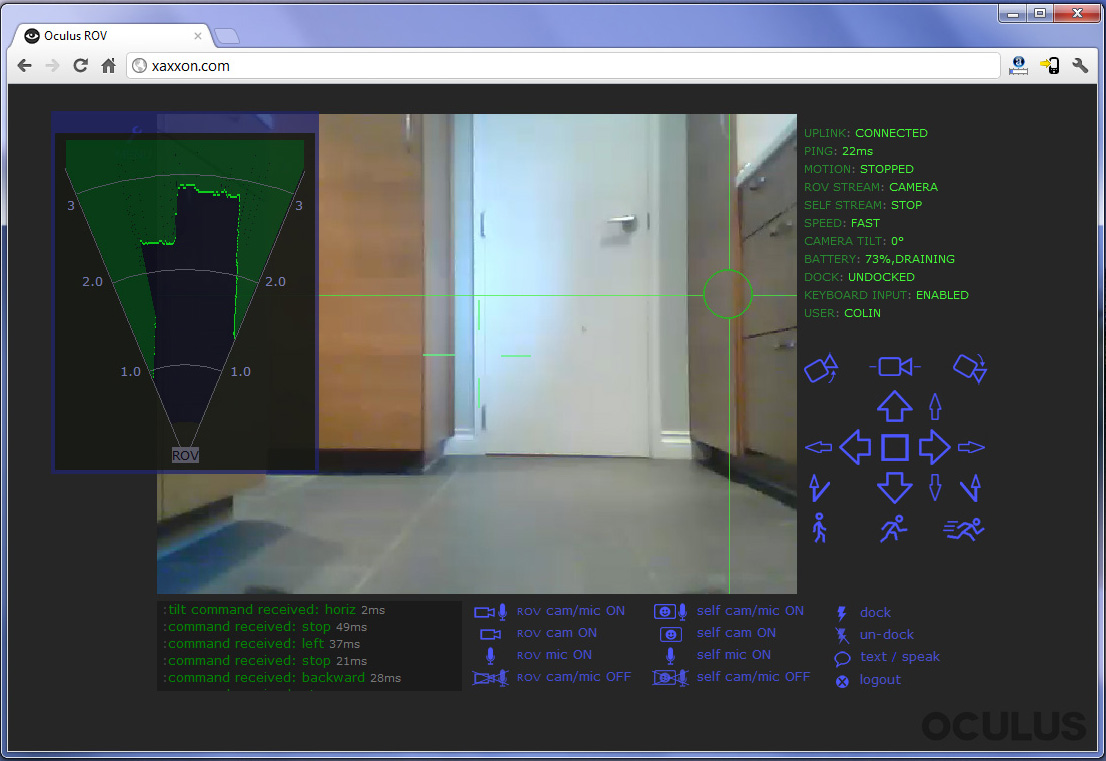
For a quick demo we came up with a “radar” widget for the Oculus remote-control web-client. The window in the upper left (above) shows a top down view of what the sensor is scanning, in the horizontal plane, to a range of 3.5 meters. To code it, we used the java wrapper to the OpenNI API that came with the sensor, to extend our Oculus server software.
We would probably expand on this with future software updates, giving Oculus more autonomous navigation capabilities, including room mapping and obstacle avoidance.
To see it all in action, check out the video below:
We’ll refine the design a bit, and have some sort of Xtion mounting bracket available as an option in a few weeks, along with a software update including basic Xtion/Kinect integration … for those who want to seriously kit out their robot.










{kind=link}
{kind=link}