is our latest mobile base platform, capable of indoor mapping, autonomous navigation and automated patrols. It's equipped
with an integrated Xaxxon
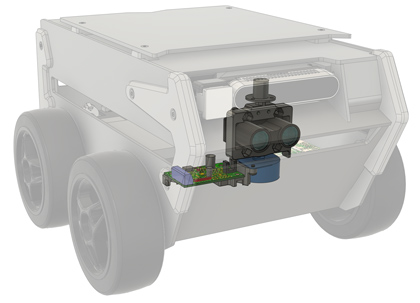
, as well as an Intel Realsense™ D415 depth camera. Inside is a full mini-ITX desktop PC motherboard with an embedded Intel CPU, running Linux OS and
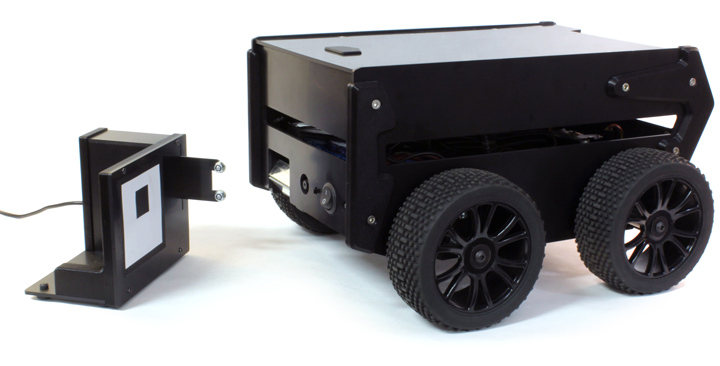
Docking with the wall-powered charging dock is handled automatically via ROS 2D image processing through the included camera and the Aruco marker on the dock.
The robot docks with the charger backwards (so it's not starting at a wall when charging).
| Sensors |
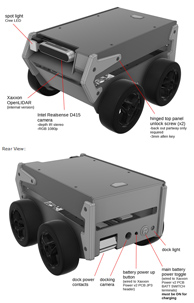
- Xaxxon OpenLIDAR rotational laser scanner
- Intel RealSense D415 Active Stereo Depth Camera with RGB
- Gyroscope: Pololu L3GD20 3-Axis
- Wheel encoder: single wheel quadrature hall-effects high resolution
- Battery current draw, system voltage and individual cell voltages
- Microphone
- RGB camera front and rear
|
| Front RGB Camera | - Intel Realsense RGB 1920x1080
|
| Audio | - Mono microphone and speaker
|
| Lights | - 2 x Cree XR-E high intensity LEDs: tilting spotlight and reverse wide angle light, dimmable
|
Front Camera/
Spotlight Tilt | - Servo actuated 40 degrees up, 20 down
|
| Frame |
- High impact CNC machined ABS, 3D printed PLA reinforcements/details
- Hinged top opening > motherboard access
- Removable bottom panel > battery/motors access
- Removable top accessory multi-mounting panel, pass thru cable hatch
|
| Rear Panel |
- Battery power toggle switch
- Power startup push switch
- Docking camera
- Reverse wide angle light
- Dock contacts
- Auxiliary DC power jack
|
| Battery | - 3 cell Lithium Polymer 5200mAh, up to 4 hour run time
- Maximum battery size: 164mm x 57mm x 38mm
|
| Battery Charging | |
| Motor Controller | - Motors/Audio/Lights/Gyro Xaxxon MALG PCB, Arduino compatible microcontroller
|
| Motors | - 4 x 12V DC gear-motors. Top speed 0.4m/s
|
| Wheels | - 4 x 125mm diameter, skid steering
|
| Charging Dock | - Automatic docking via 2D image processing
- International power compatible 120-240VAC > 15VDC wall wart
- Robot docks backwards
|
| Docking Camera | - USB 640 x 480 RGB, LED lighting
|
| System Hardware |
- Motherboard:
ASRock J5005-ITX, with Quad-Core Pentium J5005 CPU 2.8Gz
- 4Gb DDR4 RAM, up to 16Gb optional
- SSD 120Gb
- M.2 Wifi/Bluetooth mini-pcie + pigtail/antenna pair
- Xaxxon ATX Power Kit with wide input regulator
- Expansion USB2.0 hub 4-port unpowered
|
| Software |
- Remote control via web-browser, desktop and mobile clients
- Autocrawler Java Server (bitbucket): on-board
high-level motor control, multi-user, Apache Tomcat web server, webRTC streaming media server, telnet API server)
- Telnet protocol interface, automated script control, Python API
- ROS Noetic
- Autocrawler ROS package (github)
- Autonomous navigation via ROS Navigation Stack
- Mapping via Google Cartographer ROS
- Linux Ubuntu 20.04 64-bit OS
- Wifi access point mode, multiple overlapping network auto-switching
- OpenCV
|
| Firmware | - Arduino-C/Wiring open source for MALGv3 motors/encoders/gyro microcontroller and OpenLIDAR microcontroller
|
| Dimensions | - 334L x 283W x 191H (millimeters)
- 4Kg weight. (Not including charging dock)
|
| Payload /AccessoryMounting |
- Up to 10Kg
- Available top accessory multi-mounting panel, pass thru cable hatch
- Power available: 5V, 12V, ~2amps
|
| | Made in Canada |